武科大网讯 4月8日-13日,我校汽车学院许小伟、邓明星老师团队参与研发,全球首艘具备自主伴航功能拖轮—“津港轮36”在日照海域开展了自主伴航实船试验并取得圆满成功。这在国际上尚属首次实现,标志着全球首艘具备自主伴航功能的高度智能化拖轮已初步具备投入实际生产运营的条件,受到国内外主流媒体的高度关注。

图1 自主伴航实船试验效果
自主伴航——是指有人监控状态下、由系统自主锁定并自主操控船舶接近目标、伴随目标、直至并靠目标的行为。“津港轮36”自主伴航系统研发依托国家重点研发计划—中芬政府间科技合作项目开展。该项目由中国船级社(CCS)牵头,我校与上海交通大学、武汉理工大学、天津港轮驳有限公司、镇江赛尔尼柯自动化股份有限公司以及交通运输部职业资格中心共同参与。
我校汽车与交通工程学院许小伟、邓明星老师团队承担了本项目中“拖轮自主伴航多源信息融合与动态目标识别技术研究”课题,其中智能感知与目标跟踪算法为团队100% 自主研发。经6天海上试验验证表明,算法运行稳定可靠,目标感知精准并可稳定跟踪,体现出了高精度、快响应、高可靠等特点,课题预期指标得到全面验证。
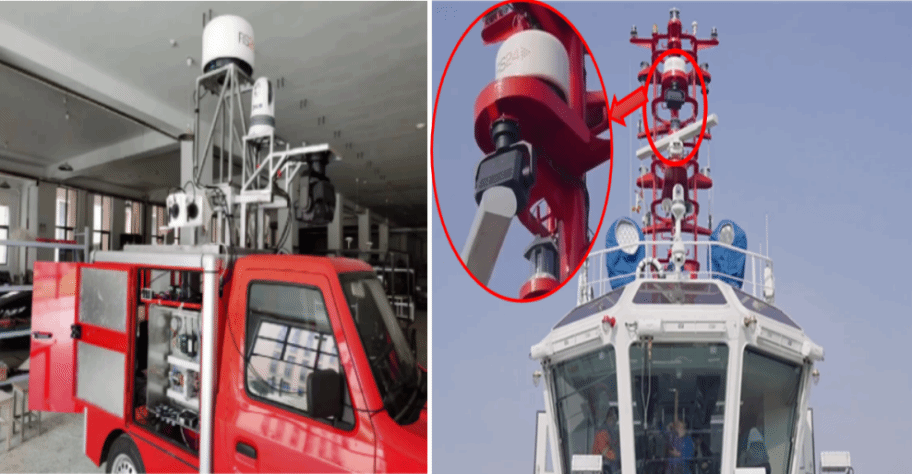
图2 智能感知与目标跟踪算法海上测试
为降低项目实施风险,高效验证算法的有效性和可靠性,根据海上复杂环境下智能感知与目标跟踪要求,利用我校在车辆自动驾驶领域积累的科研优势,针对拖轮特定应用场景和目标识别类型,团队在中国船级社的指导下,按照CCS《电气电子产品型式认可试验指南》自主研制并搭建了路基车载试验平台。
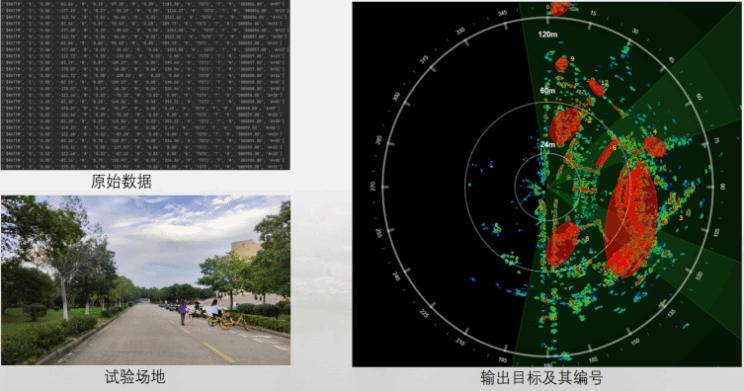
图3 智能感知与目标跟踪算法陆基测试
“津港轮36”自主伴航实船试验的圆满成功,标志我校在感知技术跨域融合应用上取得了可喜的成绩。项目团队将继续与中国船级社深度合作,积极参与相关科研项目,进而提升科研能力与工程经验,为中国智能船舶事业的发展贡献力量。(汽车学院)

图4 “津港轮36” 自主伴航实船试验现场









